1. Brinell hardness test implementation standard:
The new standard for metal Brinell hardness test method adopts the international standard ISO 6506-1:2005. The new standard is re-drafted in accordance with ISO 6506-1:2005, and according to the actual situation of our country, it has been modified and supplemented when adopting international standards.
According to the international standard structure, ISO 6506 is composed of 3 parts:
ISO 6506-1:2005 Metallic materials Brinell hardness test test method
ISO 6506-2:2005 Metallic materials Brinell hardness test Inspection and calibration of hardness testers
ISO 6506-3:2005 Metallic materials Brinell hardness test Standard hardness block calibration
ISO 6506-4:2005 Metallic materials Brinell hardness test Hardness value table
The standard compilation of my country's Brinell hardness test method corresponds to the international standard:
GB/T 231.1-2009 Metal Brinell Hardness Test Part 1 Test Method
GB/T 231.2-2012 Metal Brinell Hardness Test Part 2 Inspection and Calibration of Hardness Tester
GB/T 231.3-2012 Metal Brinell Hardness Test Part 3 Calibration of Standard Hardness Block
GB/T 231.4-2009 Metallic materials Brinell hardness test Part 4 Hardness value table


Digital Brinell Hardness Tester B-3000D Digital Brinell Hardness Tester B-3000AT
The new standard only allows the use of cemented carbide ball indenters. The Brinell hardness conforms to HBW and should not be confused with the previous symbol HB and the symbol HBS used when steel ball heads are used.
2. Features of Brinell hardness tester:
The advantage of the Brinell hardness test is that its hardness is representative. Because it usually uses a 10mm diameter ball indenter and a 3000Kg test force, its indentation area is larger, which can reflect the average value of the comprehensive influence of the various components of the metal in a larger range , And not affected by individual composition phases and small unevenness, so it is particularly suitable for the determination of gray cast iron, bearing alloys and metal materials with coarse grains. Its test data is stable, reproducible, and its accuracy is higher than Rockwell and lower than Vickers. In addition, there is a good correspondence between the Brinell hardness value and the tensile strength value.
The characteristic of the Brinell hardness test is that the indentation is large, and the finished product inspection is difficult. The test process is more complicated than the Rockwell hardness test. The measurement operation and indentation measurement are more time-consuming, and the edges of the indentation are protruding, concave or smooth. Makes the measurement of the indentation diameter produce a large error, so the operator is required to have proficient testing technology and rich experience, and generally requires the operation of a specialized experimenter.
3. Principle of Brinell Hardness Tester:
The working principle of the Brinell hardness tester is to press a cemented carbide ball of a certain diameter into the surface of the sample at a certain speed under the action of a certain test force, and then remove the test force after a specified test force retention time. Measure the diameter of the indentation on the surface of the sample, and use the average pressure on the spherical surface of the sample indentation to express the Brinell hardness of the metal.
Brinell hardness value calculation formula:
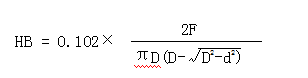
In the formula: F————The test force applied to the sample through the ball indenter, the unit is N.
D————The diameter of the ball, in mm.
d————Indentation diameter (average value), in mm.
0.102-the specified coefficient.
4. Application of Brinell hardness tester:
The Brinell hardness tester is mainly used to test the hardness of forged steel and cast iron with uneven structure. The Brinell hardness of forged steel and gray cast iron has a good corresponding relationship with the tensile test. The Brinell hardness test can also be used for non-ferrous metals and mild steel. The small diameter ball indenter can be used to measure small size and thin materials. The Brinell hardness tester is mostly used for the inspection of raw materials and semi-finished products. Due to the large indentation, it is generally not used for the inspection of finished products.
5. Selection of test force of Brinell hardness tester:
The selection of Brinell hardness test conditions is the same as the selection of scales in Rockwell hardness test. Brinell hardness test also encounters the selection of test conditions, that is, the choice of test force F and indenter ball diameter D. This choice is not arbitrary, but must follow certain rules, and pay attention to the reasonable combination of test force and indenter ball diameter, the application is slightly more complicated than the Rockwell hardness test.
The national standard stipulates 4 kinds of diameter cemented carbide balls as indenters.
The test force under different conditions of Brinell hardness is as follows:
Hardness symbol
| Sphere diameter
D/mm | Force-indenter diameter ratio
0.102×F/D2/
(N/mm2) | Test force
Nominal value
F/N |
HBW 10/3000
HBW 10/1500
HBW 10/1000
HBW 10/500
HBW 10/250
HBW 10/100 HBW 5/750
HBW 5/250
HBW 5/125
HBW 5/62.5
HBW 5/25 HBW 2.5/187.5
HBW 2.5/62.5
HBW 2.5/31.25
HBW 2.5/15.625
HBW 2.5/6.25 HBW 1/30
HBW 1/10
HBW 1/5
HBW 1/2.5
HBW 1/1 | 10
10
10
10
10
10 5
5
5
5
5 2.5
2.5
2.5
2.5
2.5 1
1
1
1
1 | 30
15
10
5
2.5
1 30
10
5
2.5
1 30
10
5
2.5
1 30
10
5
2.5
1 | 29420
14701
9807
4903
2452
980.7 7355
2452
1226
612.9
245.2 1839
612.9
306.5
153.2
61.29 294.2
98.07
49.03
24.52
9.807 |
In order to reflect the hardness value of the style as large as possible, choose a large-diameter indenter for testing.
When the thickness of the sample allows, a ball indenter with a diameter of 10 mm should be preferred.
The selection of test force must ensure that the indentation diameter d is between 0.24D and 0.6D.
The test force-indenter diameter square ratio (0.102F/D2 ratio) should be selected according to the material and hardness value:
material
| Brinell hardness HBW | Test force-indenter diameter ratio
0.102×F/D2/(N/mm2) |
Steel, nickel alloy, titanium alloy |
| 30 |
Cast iron 1) | <140 | 10 |
≥140 | 30 |
Copper and copper alloys | <35 | 5 |
35~200 | 10 |
>200 | 30 |
Light metals and their alloys | <35 | 2.5 |
35~80 | 5 |
10 |
15 |
>80 | 10 |
15 |
Lead, tin |
| 1 |
1) For the experiment of cast iron, the nominal diameter of the indenter should be 2.5, 5, 10mm in general |
6. Brinell hardness requirements for samples:
1) Surface quality of sample
The surface of the sample should be smooth and flat, and the surface should be free of oxide scale and external dirt, especially no grease. The surface finish of the sample should be able to ensure accurate measurement of the indentation diameter. It is recommended that the surface roughness Ra of the sample is usually not more than 1.6μm. Too rough surface of the sample will reduce the ability of the sample to resist the experimental force, resulting in a low Brinell hardness value. On the other hand, it also brings a large error to the measurement of the indentation diameter, which makes the experimental results scattered. Big.
When preparing the sample, the influence of factors such as overheating or cold working on the surface properties of the sample should be minimized.
2) Minimum thickness of sample
The thickness of the sample is clearly stipulated in the national standard: the thickness of the sample should be at least 8 times the depth of the indentation.
Table of relationship between average diameter of indentation and minimum thickness of specimen mm
Average diameter of indentation d | Minimum thickness of test piece |
Ball diameter |
D=1 | D=2.5 | D=5 | D=10 |
0.2 | 0.08 |
|
|
|
0.3 | 0.18 |
|
|
|
0.4 | 0.33 |
|
|
|
0.5 | 0.54 |
|
|
|
0.6 | 0.8 | 0.29 |
|
|
0.7 |
| 0.4 |
|
|
0.8 |
| 0.53 |
|
|
0.9 |
| 0.67 |
|
|
1 |
| 0.83 |
|
|
1.1 |
| 1.02 |
|
|
1.2 |
| 1.23 | 0.58 |
|
1.3 |
| 1.46 | 0.69 |
|
1.4 |
| 1.72 | 0.8 |
|
1.5 |
| 2 | 0.92 |
|
1.6 |
|
| 1.05 |
|
1.7 |
|
| 1.19 |
|
1.8 |
|
| 1.34 |
|
1.9 |
|
| 1.5 |
|
2 |
|
| 1.67 |
|
2.2 |
|
| 2.04 |
|
2.4 |
|
| 2.46 | 1.17 |
2.6 |
|
| 2.92 | 1.38 |
2.8 |
|
| 3.43 | 1.6 |
3 |
|
| 4 | 1.84 |
3.2 |
|
|
| 2.1 |
3.4 |
|
|
| 2.38 |
3.6 |
|
|
| 2.68 |
3.8 |
|
|
| 3 |
4 |
|
|
| 3.34 |
4.2 |
|
|
| 3.7 |
4.4 |
|
|
| 4.08 |
4.6 |
|
|
| 4.48 |
4.8 |
|
|
| 4.91 |
5 |
|
|
| 5.36 |
5.2 |
|
|
| 5.83 |
5.4 |
|
|
| 6.33 |
5.6 |
|
|
| 6.86 |
5.8 |
|
|
| 7.42 |
6 |
|
|
| 8 |
In addition to the thickness of the sample meeting the requirements in the table, the back of the sample should also be checked after the test. If there are deformation marks on the back of the sample, it indicates that the thickness of the sample is insufficient.
7. Brinell hardness test requirements:
The sample should be placed on a rigid support. The back of the pattern and the support should be cleaned of any external dirt (cultivation skin, oil, dust, etc.). The pattern is firmly placed on the support to ensure no displacement during the experiment. The time from the start of the application of the force to the application of the entire test force shall be between 2s and 8s. The test force holding time is 10s~15s. For materials that require a longer test force retention time, the test force retention time error is ±2s. During the entire test period, the hardness tester should not be subjected to shocks and vibrations that affect the test results. The distance between the center of any indentation and the edge of the pattern is at least 2.5 times the average diameter of the indentation. The distance between the centers of two adjacent indentations is at least 3 times the average diameter of the indentations. The indentation diameter should be measured in two mutually perpendicular directions. Use the average of two readings to calculate the Brinell hardness.
Note: For automatic measuring devices, the following methods can be used for calculation:
——The average value of multiple measurements at equal intervals;
——The numerical value of the projected area of the material surface indentation.
8. Expression of Brinell hardness test results:
The Brinell hardness is represented by the symbol HBW, the front of the symbol HBW is the hardness value, and the back of the symbol is the indication of the experimental conditions in the following order:
Diameter of indenter, mm; test force number; test force holding time different from the specified time, s;
Example 1: 350HBW5/750 The Brinell hardness value measured by a ball with a diameter of 5mm at a test force retention time of 10s to 15s at 7.355kN is 350.
Example 2: 600HBW1/30/20 The Brinell hardness value measured by a ball with a diameter of 1mm at a test force retention time of 294.2N for 20s is 600.
Nine, the uncertainty of the Brinell hardness test results
There are many factors that affect the uncertainty of the experimental results, which can be divided into the following two categories: 1. Parameters related to the Bush hardness tester (including the hardness tester calibration error and the standard block calibration error). 2. Parameters related to the test method (changes in operating conditions).
10. Brinell hardness measurement range
The upper limit of the Brinell hardness test range specified by the standard is 650HBW.
For the experiment of special materials or products, it should be stipulated in special standards.
11. Brinell hardness test report:
The test report includes the following:
The number of this part of GB/T 231; the detailed information about the style; if the test temperature is not 10℃~35℃, the test temperature should be indicated: the result of the test; the operation not within the provisions of this part of GB/T 231; affect the test result Various details.
12. Daily inspection of Brinell hardness tester:
Users should check the hardness scale or range they use before using the hardness tester that day. Before the daily inspection, (for each range/scale and hardness level), the standard indentation on the standard hardness block calibrated in accordance with GB/T 231.3 should be used for indirect inspection of the indentation measuring device. The measured value of indentation should be within 0.5% of the standard value on the standard hardness block certificate. If the measuring device cannot meet the above requirements, corresponding measures should be taken. Daily inspection should make at least one indentation on the standard hardness block calibrated according to GB/T 231.3. If the difference between the measured hardness (average) value and the standard value of the standard hardness block is within the allowable error given in GBB/T 231.2, the hardness tester is considered satisfactory. If it exceeds, indirect inspection should be carried out immediately. All data should be kept for a period of time while monitoring the stability of the exclusive reproducibility and measurement equipment.







